
Il robot a portale è costituito da un telaio a colonna, un componente dell'asse X, un componente dell'asse Y, un componente dell'asse Z, un dispositivo di fissaggio e una scatola di controllo.
Si tratta di un'apparecchiatura industriale completamente automatica basata sul sistema di coordinate tridimensionali rettangolari X, Y, Z, che può regolare la posizione del pezzo o realizzare il movimento della traiettoria del pezzo. Il suo nucleo di controllo è implementato tramite controllori industriali.
Il controller analizza ed elabora vari segnali di ingresso, formula giudizi logici, quindi invia comandi di esecuzione a ciascun componente di uscita per completare il movimento congiunto tra gli assi X, Y e Z e realizzare una serie completa di processi operativi completamente automatici.
Viene utilizzato nell'assemblaggio e nel trasporto dei prodotti, nei sistemi di trasporto e nei cantieri senza personale. Può essere utilizzato come importante apparecchiatura periferica per lo stoccaggio temporaneo e la logistica e può essere abbinato in modo flessibile all'apparecchiatura host per un facile utilizzo. Industrie applicative coinvolte in: assemblaggio finale, sottoassemblaggio, lavorazione, test, debugging e trasporto di prodotti e così via.
Le caratteristiche del prodotto aiutano i clienti a risolvere i problemi di bassa efficienza o di rischi elevati di movimentazione in vari tipi di movimentazione dei materiali, in modo da ridurre in modo conveniente e rapido i rischi di movimentazione, risparmiare tempo, fatica, risparmiare manodopera e persino sostituire la manodopera.
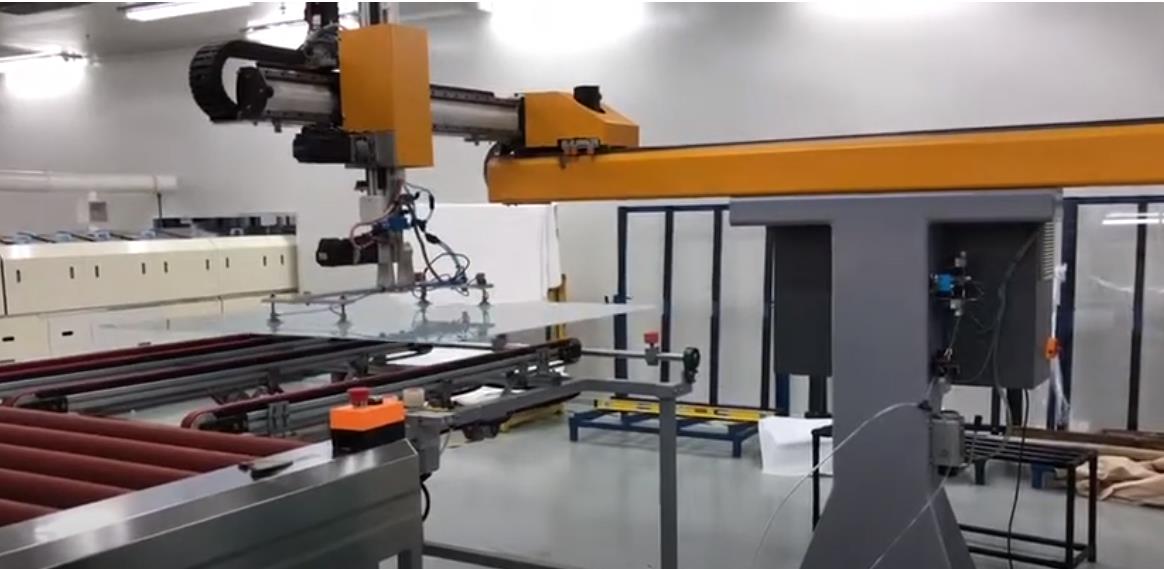
 Questo dispositivo di movimentazione del manipolatore a traliccio a portale per il vetro comprende colonne e traverse installate sulle colonne. Le traverse sono installate con guide di scorrimento. Le guide di scorrimento sono installate con un dispositivo di scorrimento trasversale. Il dispositivo di scorrimento trasversale è installato con un dispositivo di scorrimento verticale e un dispositivo a ventosa pneumatica. Può essere realizzato Il meccanismo di trasporto si muove in un punto fisso nello spazio tridimensionale, aspira il vetro attraverso la ventosa, prima si sposta lateralmente sull'asse X, quindi ruota di 90 gradi nella posizione designata, quindi si sposta verso l'alto e in basso sull'asse Y. Una volta raggiunta la posizione impostata, rilasciare il bicchiere e posizionarlo sul ripiano in vetro. La stabilità strutturale dell'intero dispositivo è molto elevata, il che migliora notevolmente la maneggevolezza. efficienza.
Questo dispositivo di movimentazione del manipolatore a traliccio a portale per il vetro comprende colonne e traverse installate sulle colonne. Le traverse sono installate con guide di scorrimento. Le guide di scorrimento sono installate con un dispositivo di scorrimento trasversale. Il dispositivo di scorrimento trasversale è installato con un dispositivo di scorrimento verticale e un dispositivo a ventosa pneumatica. Può essere realizzato Il meccanismo di trasporto si muove in un punto fisso nello spazio tridimensionale, aspira il vetro attraverso la ventosa, prima si sposta lateralmente sull'asse X, quindi ruota di 90 gradi nella posizione designata, quindi si sposta verso l'alto e in basso sull'asse Y. Una volta raggiunta la posizione impostata, rilasciare il bicchiere e posizionarlo sul ripiano in vetro. La stabilità strutturale dell'intero dispositivo è molto elevata, il che migliora notevolmente la maneggevolezza. efficienza.

Orario di pubblicazione: 18 marzo 2024



